Wunderbot - GPS Subsystem Tutorial
If there
are any questions about this
tutorial feel free to email me at
patrickm@etown.edu
and I will try to answer them.
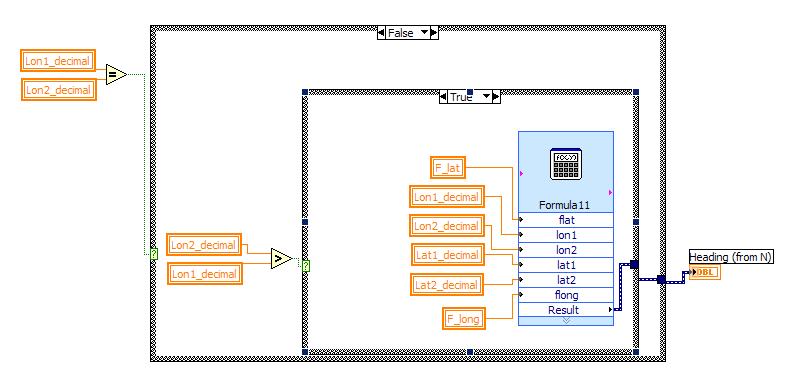
There are
two VIs within the actual GPS processing subsystem. In
addition to the processing VIs there are Path Planning algorithms
implemented in other software that are run before execution; these
algorithms are not included as part of this tutorial.
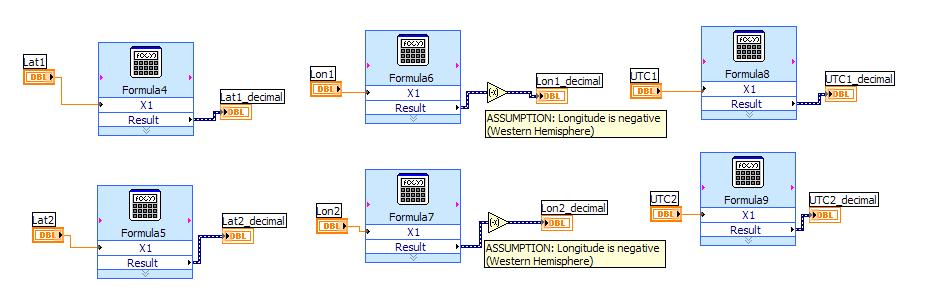
DDMM to Decimal Conversion
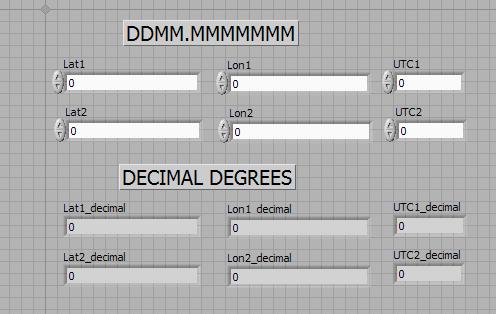
This VI takes the lattue and longetude format given at competition and
converts it to the decimal format used on the robot.