Wunderbot - JAUS Subsystem Tutorial
If there
are any questions about this
tutorial feel free to email me at
patrickm@etown.edu
and I will try to answer them.
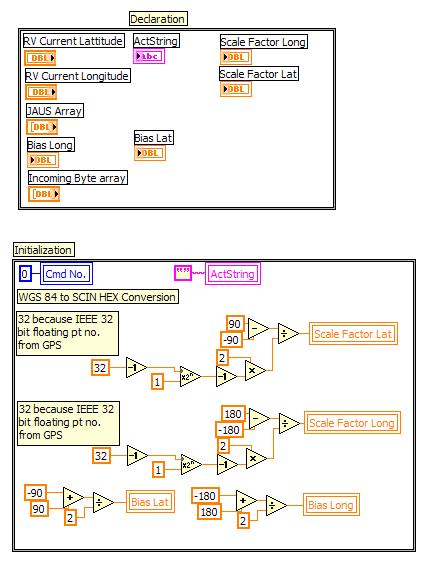
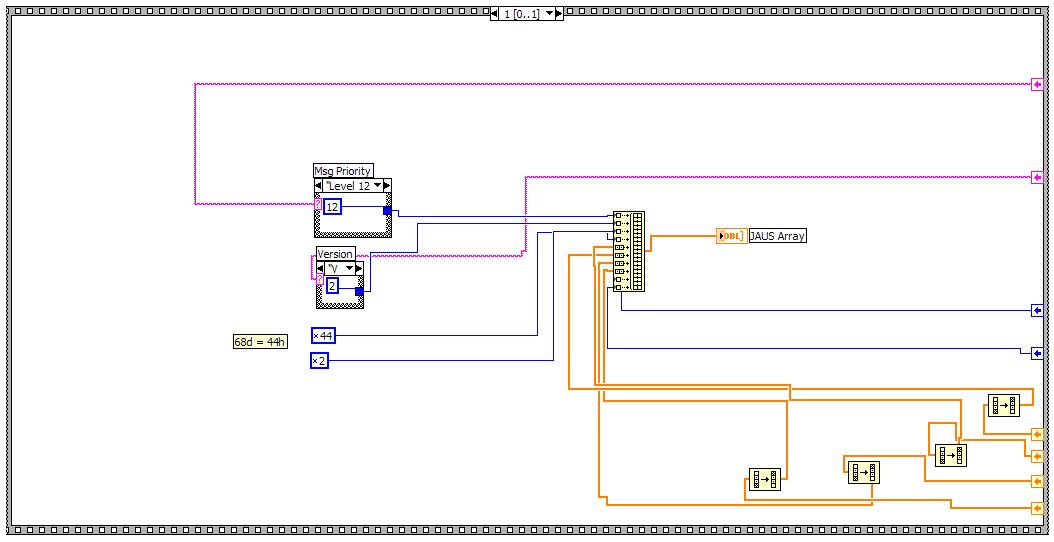
This tutorial outlines the JAUS Subsystem VIs used on the robot.
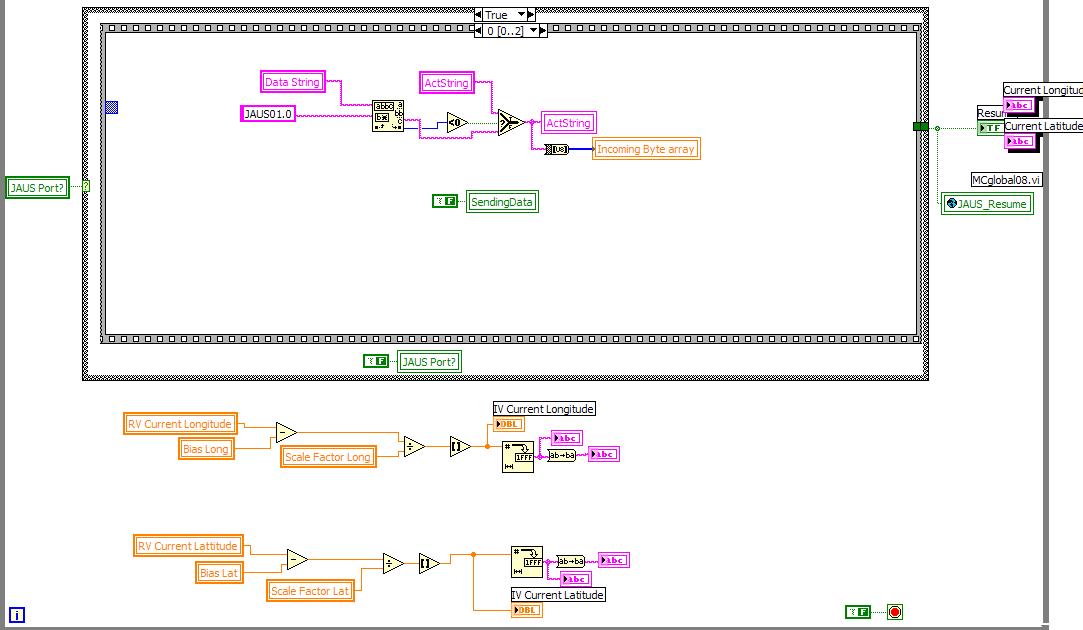
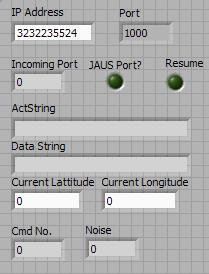
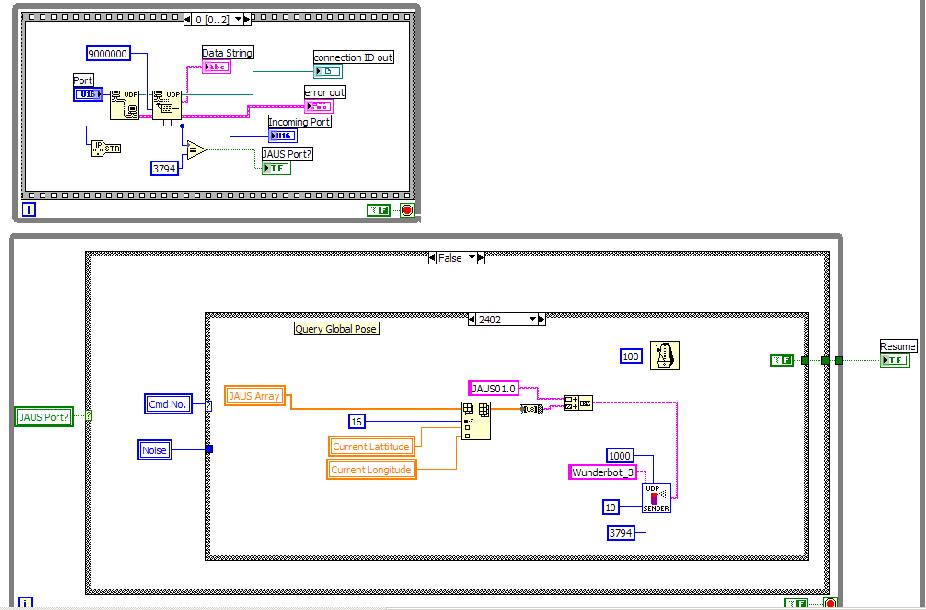
Main VI:
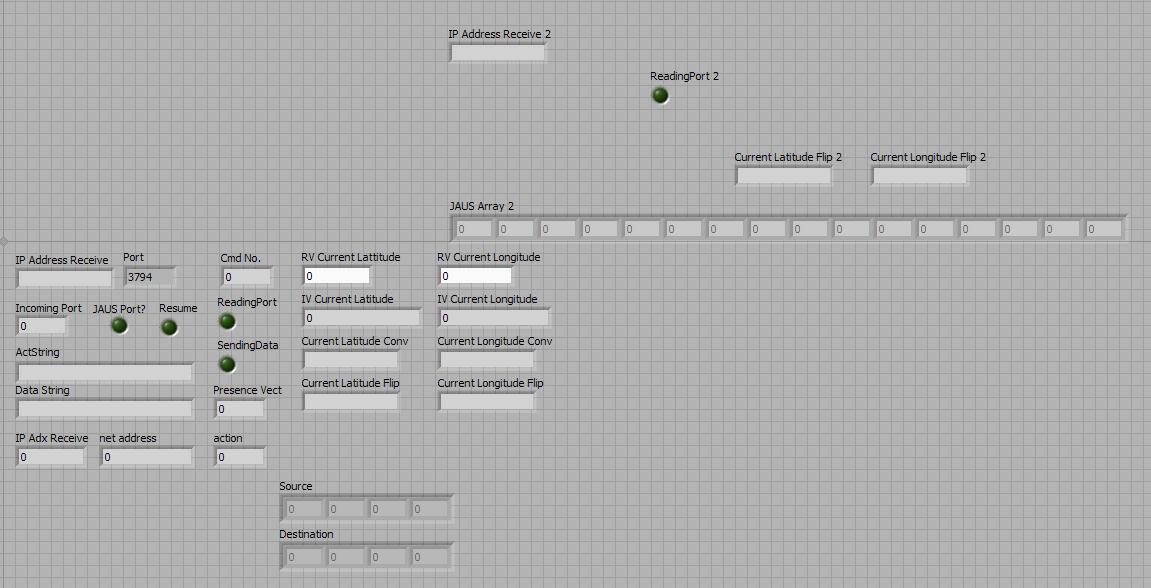
This is the main VI for the JAUS subsystem. It displays all relavant JAUS information.