|
Primary
Contacts:
Mike Patrick
1803 Baugher Avenue
Elizabethtown, PA 17022
610.209.3529 (cell)
|
|
Dan Fenton
667 Baugher Avenue
Elizabethtown, PA 17022
484.888.6606 (cell)
|
|
Recent
Sightings:
Semester meetings dates
and locations will be posted soon.
Recruiting presentation
dates and locations will be posted as they become approved.
|
|
Want to Learn More!
Click here
for details about how the Wunderbot works.
|
|
|
|
|
Vision System 2008
Project #2
for
CS434: Artificial Intelligence & Robotics
James Painter '08
After the vision system's subpar
performance at IGVC 2006, it stands as a primary subsystem for
improvement in preparation for Wunderbot IV's entry to IGVC 2008. Here,
I will explain the changes I have begun to make and the promising
results.
(Click to expand each section)
Problem
|
IGVC Autonomous Challenge: Traverse a path bounded by two parallel
spraypainted white lines separated by ten feet.

|
Strategy
|
Simulate stereo vision by dividing the single view vertically into a
left and right half. Search for the presence of the line on either
side. If found on the left, calculate the distance away from the robot
by measuring the vertical position in the viewing screen, and then
decrease the speed of the right wheel by an amount proportional to the
proximity of the line. And vice versa for the right side.
|
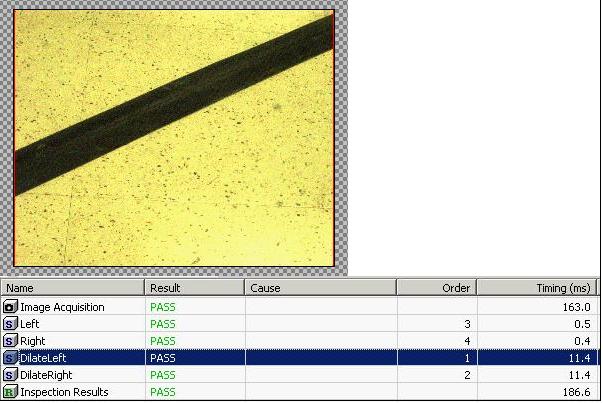
Line Detection
|
The proprietary
software packaged with the camera contains powerful built-in image
processing functions. In order to more accurately find the line,
pre-process the image using a filter. Many choices were available, and
I found these three to be effective:
- De-Noise
- Dilate
- Explicit convolution filter
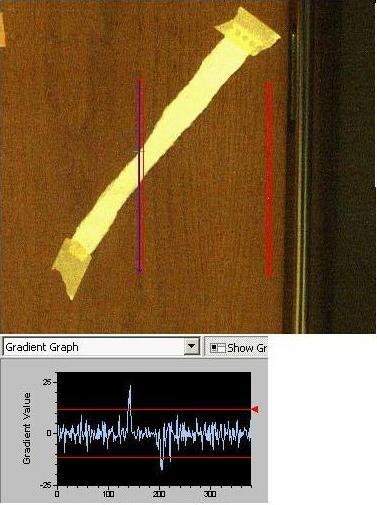
Some preliminary testing showed the benefits of using a dilation filter
to eliminate small holes.
Gradient on left side using no filter:
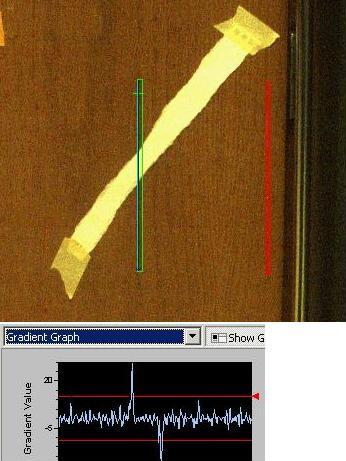
Gradient on left side using 3x3 dilation filter:
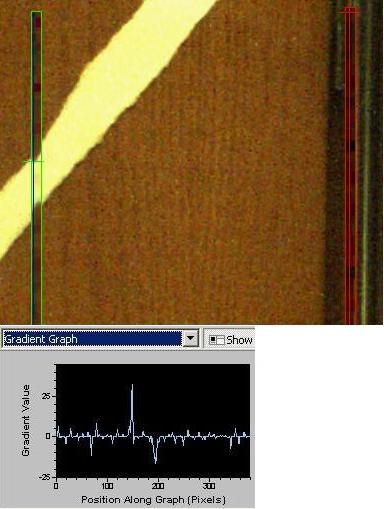
Gradient on left side using 9x9 dilation filter:
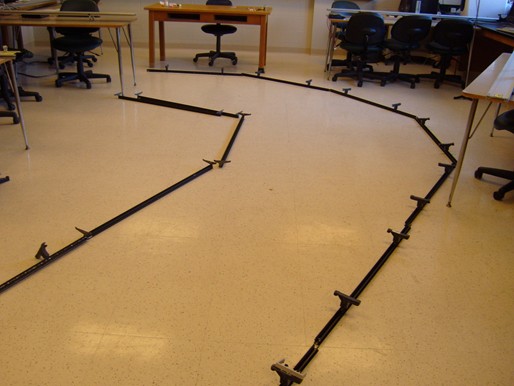
Test course:
De-noising is most effective for our
given surface of speckled flooring and allowed me to achieve over 90%
accuracy. The filter was applied strictly to the one-pixel-wide line
detection region only, in order to keep processing time as low as
possible.
|
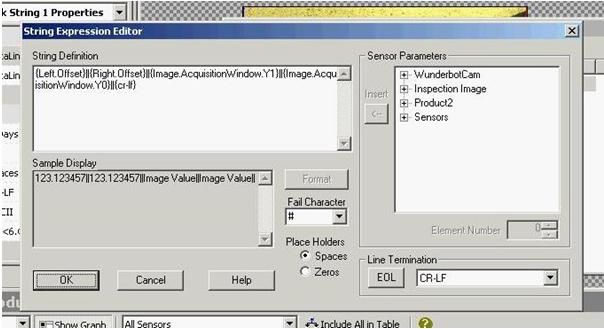
TCP/IP Send String
|
|
Every 50ms, a data string is sent
through TCP/IP to LabView containing a customized series of four
numbers separated by "||". The first two are the y-coordinates of the
top and bottom pixels in the viewable region. In order to conserve
time, the viewable region can be cropped. In my demonstration, however,
I use the entire view, making these first two commands 1279 and 1023.
The second two numbers sent are the y-coordinate of a line found on the
left and right side respectively. If none is found, it defaults to
1023.
|
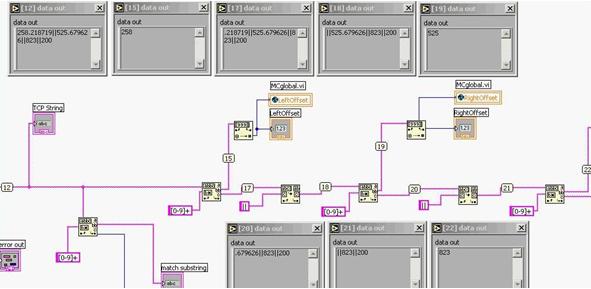
LabVIEW TCP/IP Parsing
|
A camera VI in LabVIEW is continually running in a while loop to check
for the camera's TCP/IP string. Once detected, it then parses the
string back into its individual parts using a sequence of
"match-string" controls. The values are separated and put into global
variables for the main motor control VI.
|
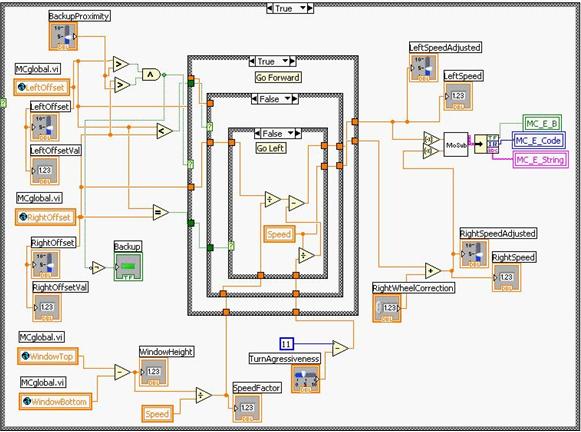
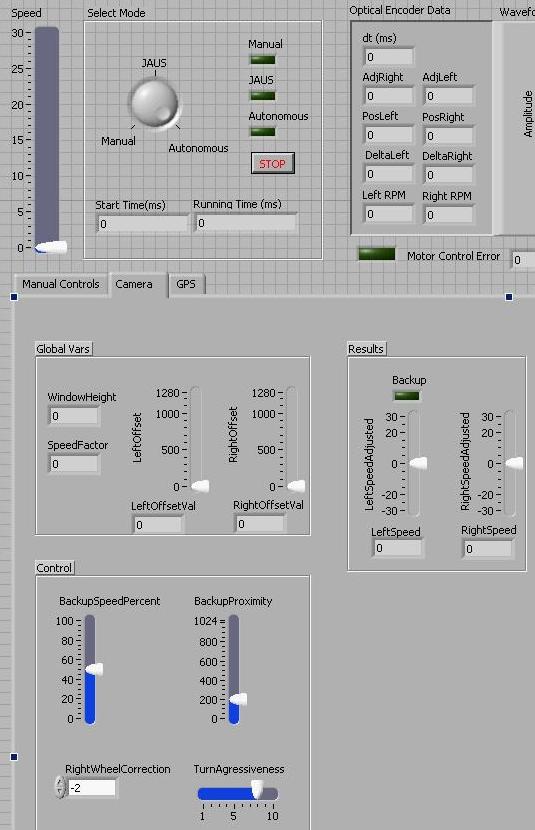
LabVIEW Motor Control
|
Within the motor
control VI is contained the logic for the robot to intelligently avoid
lines, based on the location of the lines sent from the camera. It
checks to see if lines detected on the left or the right are closer, if
present at all. The speed of the wheel on the opposite side is then
decreased. The amount of decrease is calculated based on the y-position
of the detected line, where lower means closer to the robot. Also
factored into the calculation is an "TurnAggressiveness" factor, a
value between 1 and 10 determined by the user. If the line is located
within a certain "BackupProximity" (user-determined), then the robot
halts its forward progress and runs in reverse until the line is found
outside that given range.
|
Miscellaneous Factors
|
- Due to some weight imbalance, the
robot does not drive straight when sent identical speed commands to the
motor controllers. Thus, a turning correction factor is added to one
wheel at all times.
- The robot is seen slowing down
while turning. This is due to the resistance of the misaligned casters.
Constant force is applied by the motor controllers at all times, but
there is a force required to overcome the casters, which takes away
from the robots forward speed.
- All these factors will be corrected
once closed-loop control is implemented. The optical encoders will be
able to detect when the robot is not making the exact forward progress
specified (accurate to 17mm), and will increase/decrease the force
applied by the motor controllers accordingly.
|
Structural Modifications
|
The orientation of
the robot was reversed (front=back, back=front) for three reasons.
- The original camera position left
the viewing range obstructed by the batteries, and the camera could not
see the region of about two feet directly in front of the wheels. With
the camera on the rear (now front), the viewing region to the wheels
was unobstructed.
Old View:
New View:

- When approaching a line very
closely and having to make a sharp turn, the front wheels would act as
the pivot and the rear of the robot would swing around, often
unconsciously right over the boundary line. With the new orientation,
the front wheels directly under the camera are swung, which makes the
robot's swinging footprint more predictable.
- The the new orientation has a
convenient, flat mounting area on the front bumper. This makes a nice
place for the laser range-finders that will soon be integrated into the
Wunderbot.
After the robot was programmed to run
in reverse, the camera position still needed some adjusting before it
could see directly in front of the wheels. Thus, it was raised on the
digital compass pole about eight inches, and its downward tilt angle
was increased to about 70 degrees.
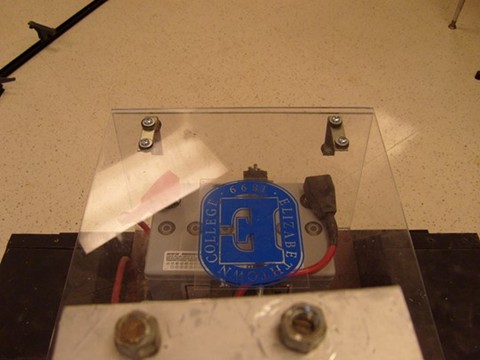
New state-of-the-art camera mount: 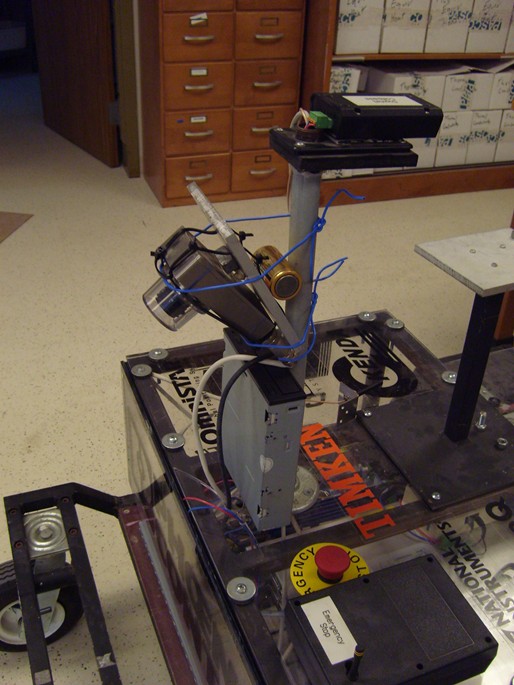
|
Demonstration
|
| Video
Link |
|
|


