Wunderbot - Digital Compass Subsystem Tutorial
If there
are any questions about this
tutorial feel free to email me at
patrickm@etown.edu
and I will try to answer them.
The
digital compass subsystem reads in the data string from the compass and
returns the current bearing. While simple it is vital to many sub
systems of the robot.
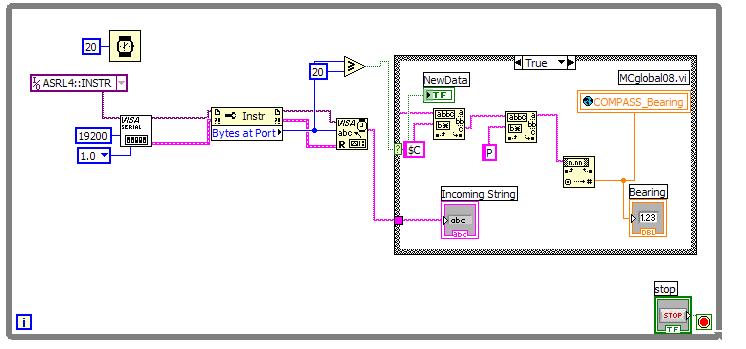
The
VI reads in the data over the serial port and as longs as it is
recieving new data continues to parse the data and output the current
bearing.

