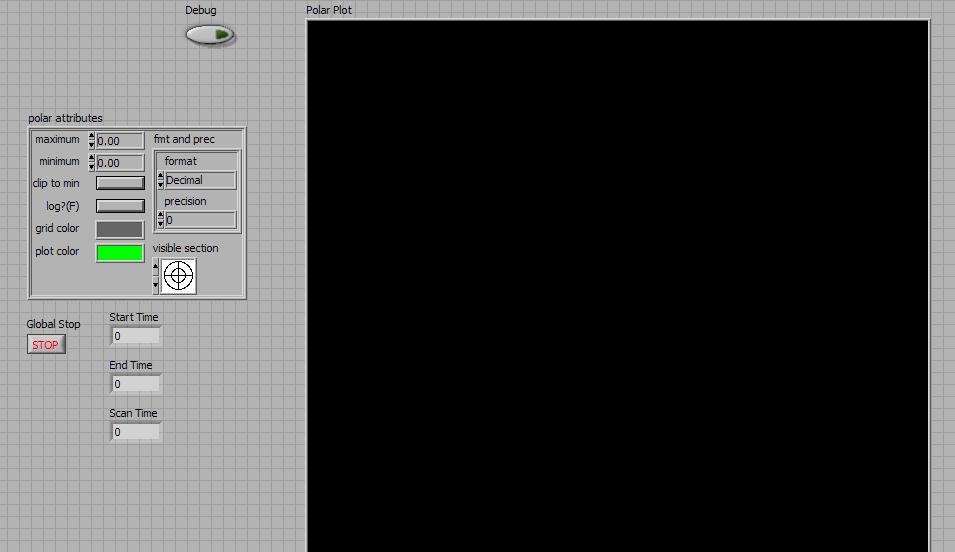
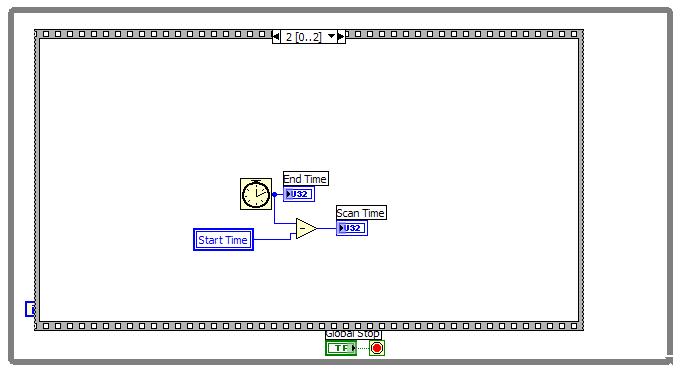
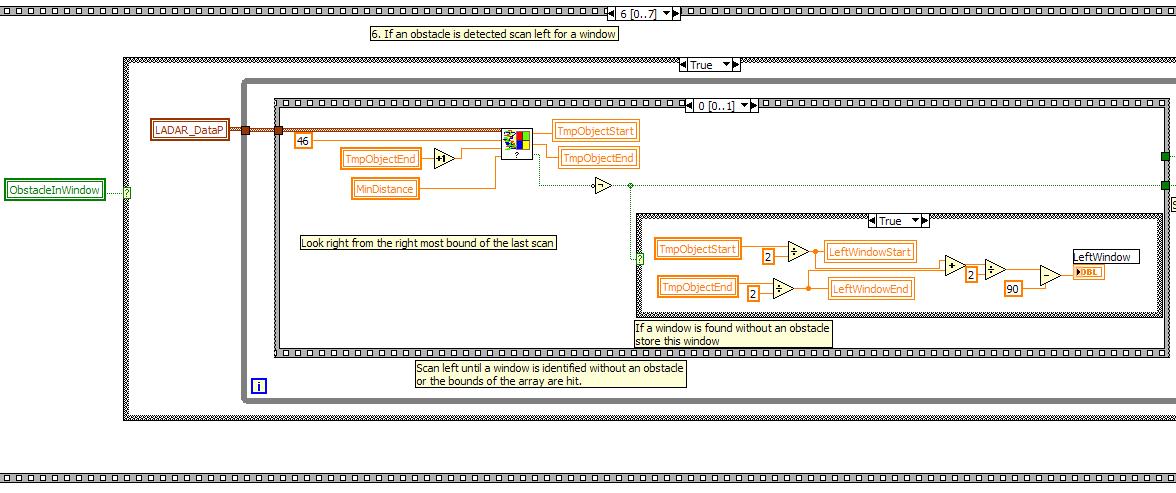
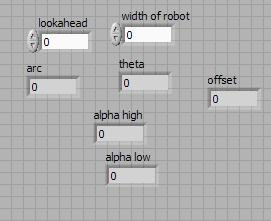
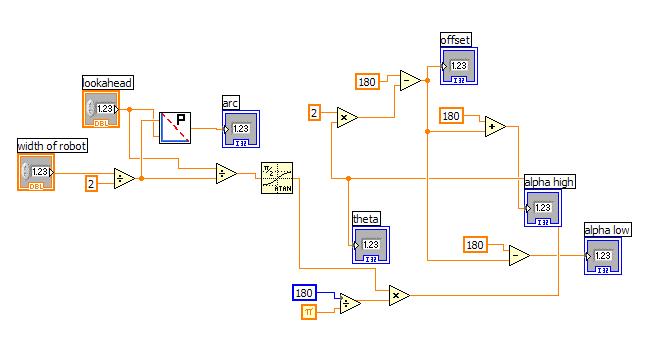
This
is the fron panel for the Ladar Angle VI. It calcualtes the angle
vector for the robot to best transverse the obstacle. It takes
into accout the width of the robot and the lookahead distance we set.
This VI calculates the angle the robot needs to folow to enter the open window between obstacles.
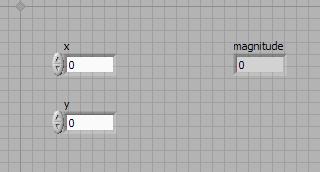
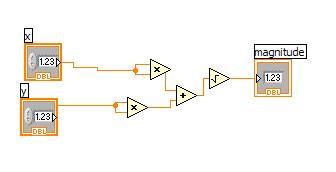
There
are several VIs created to convert one form of units to another for use
in the program. These VIs are an essential part of the program as
they allow us to quickly change between coordinate systems or number
bases,
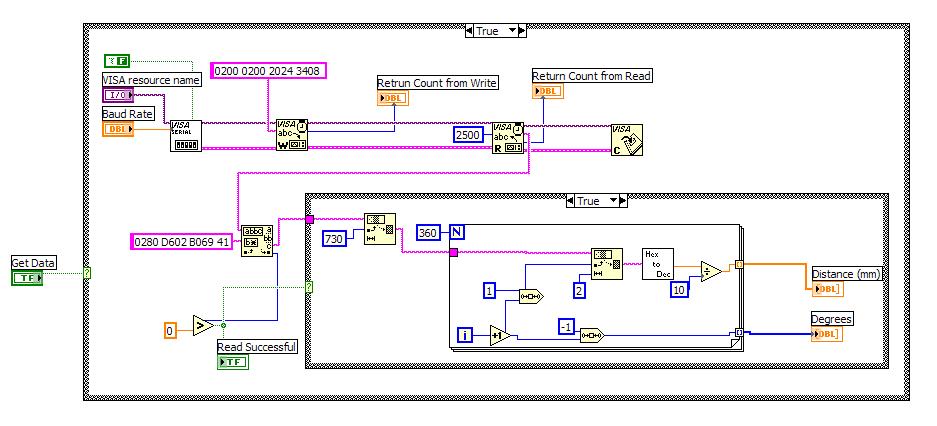
Hex2Dec VI
This is the front panel for the VI. It converts a HEX string to a Decimal number.
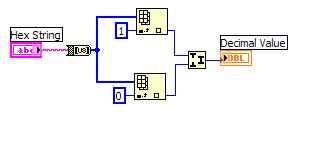
The Hex string is read in a parsed using built in array managmeny and outputs a decimal value
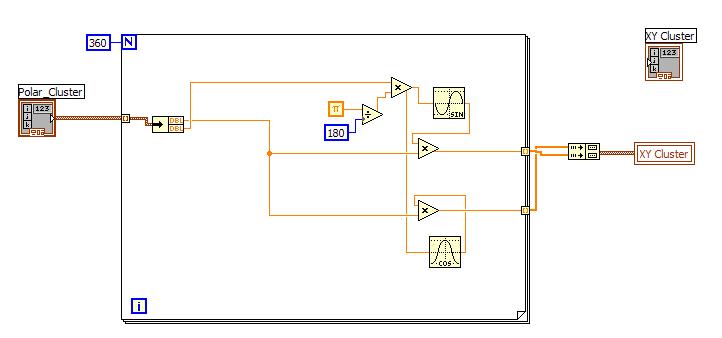
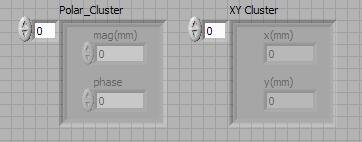
Polar2Cart VI
This is the front panel for a vi that calculates the x and y coordinates from polar coordiantes.