
Primary Contacts:
Dan Fenton
667 Baugher Avenue
Elizabethtown, PA 17022
484-888-6606 (cell)
Recent Sightings:
- Semester meeting times will be posted soon.
- On January 14, 2011, Elizabethtown College will be hosting an executive meeting for Phoenix Contact, and the robot will hold a demonstration.
Want to learn more?
Click here for details about how the Wunderbot works.
Wunderbot VI - Main Tutorial
If you have any questions about this tutorial, please email Daniel Fenton at fentond@etown.edu.
Front Panel
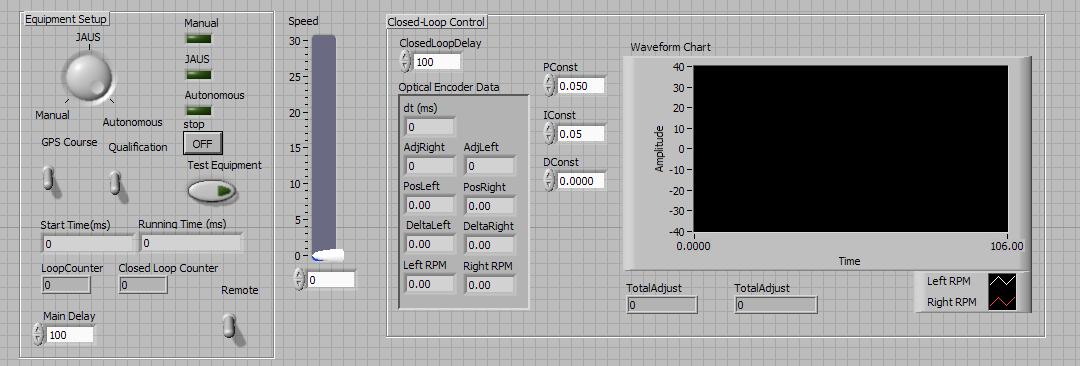
The Main VI allows the user to set up the initial settings for the Wunderbot's operation. There is a cirular switch to choose between JAUS, Manual and Autonomous Mode. We have also included switches to choose the GPS Course or Qualification/Obstacle Course in Autonomous Mode or to use the Keyboard or Remote in Manual Mode. The Speed Slider allows the user to select the speed in manual mode. On the right hand side, the variables and output of the PID controller are shown as well as a graph of the motor response.

This is the manual control tab of the FrontPanel. This tab is used when controlling the Wunderbot manually with either the keyboard or the remote control. There are keys for the desired direction of travel and slider indicators to show he target speed for each drive wheel.
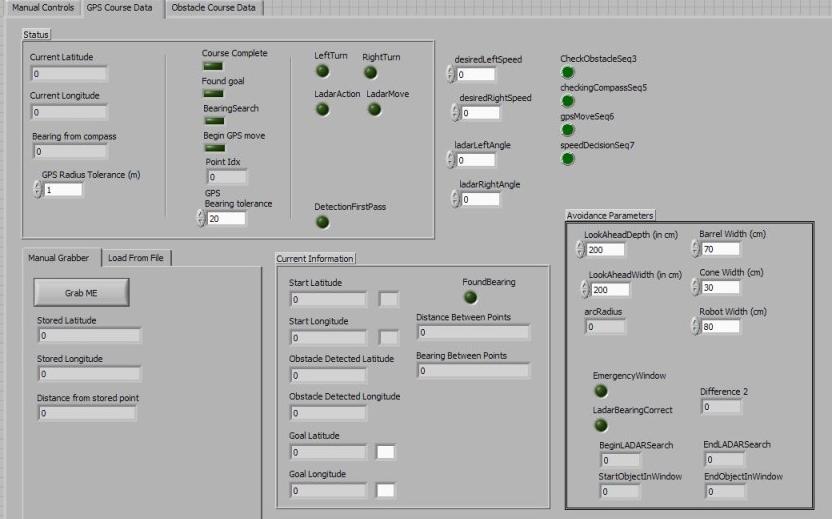
This is the GPS Tab showing the relevant information while navigating the GPS course. There are various LEDs indicating bolean variables and indicators showing current location. The boolean LEDs are invaluable for debugging purposes allowing you to see which variables are beeing set true and therefore which sequences are being entered.
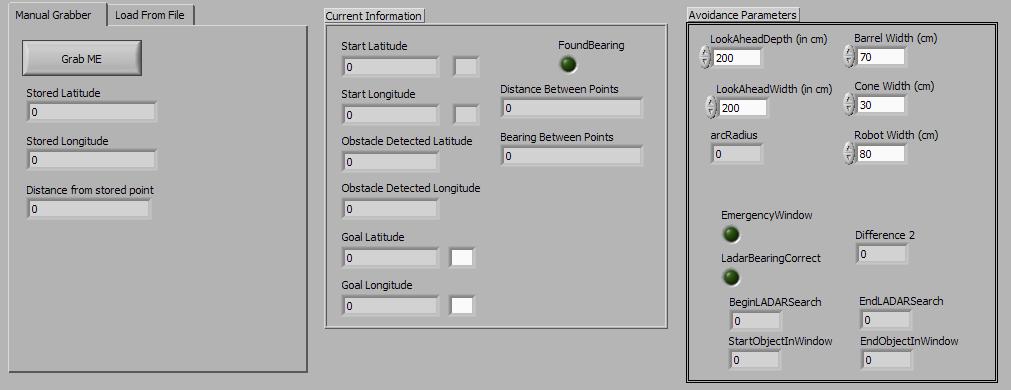
This is showing the manual grabber subtab of the GPS tab. This manual grab allows the user to grab different GPS points manually to set up a test GPS navigation course.
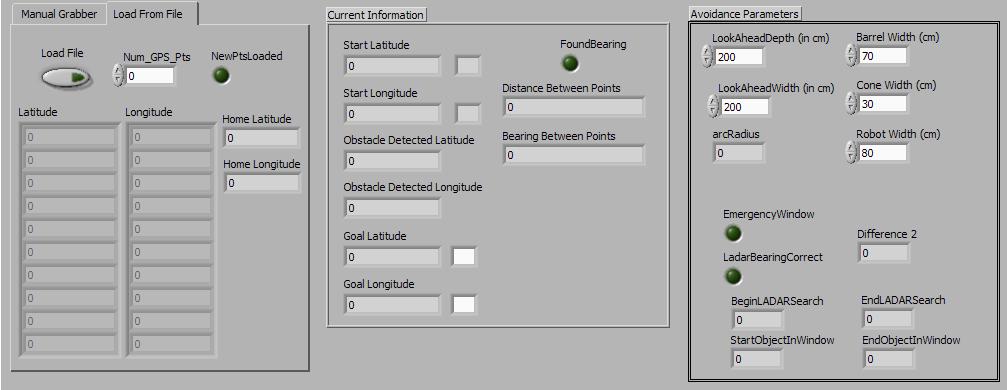
This shows the from file subtab of the GPS tab. This allows the user to load a file of predefined GPS points to navigate. At competition the gps course is entered into the path planning program and the ideal sequences is determined. This sequence is then stored in a file and loaded to the Wunderbot for the navigation course.
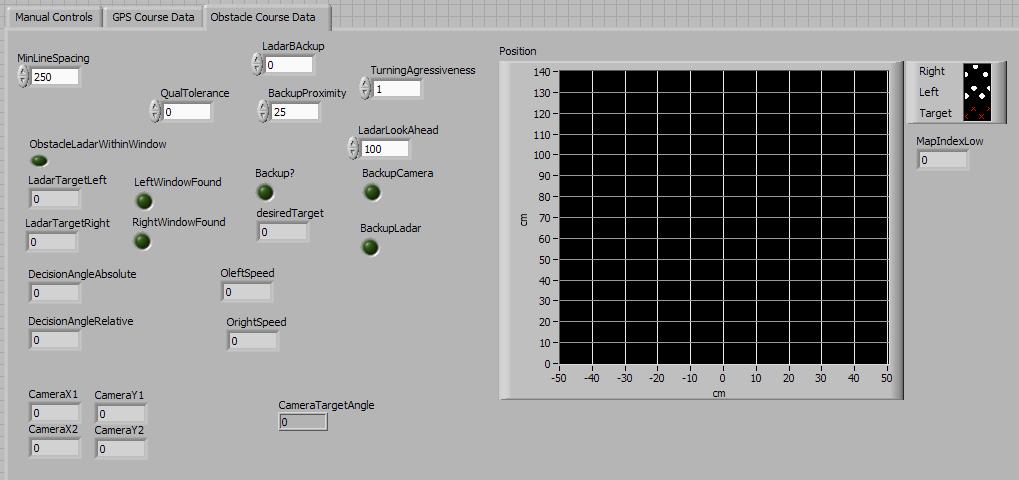
This is the Obstacle tab of the front panel. This allows the user to set constants like turning aggressivness, lookahead distance, backup proximity etc. It also displays pertinent information from different decisions made in the code.
Global Variables
All of the variables for the Wunderbot are Global so they can easily be passed between different VIs in the control loop.
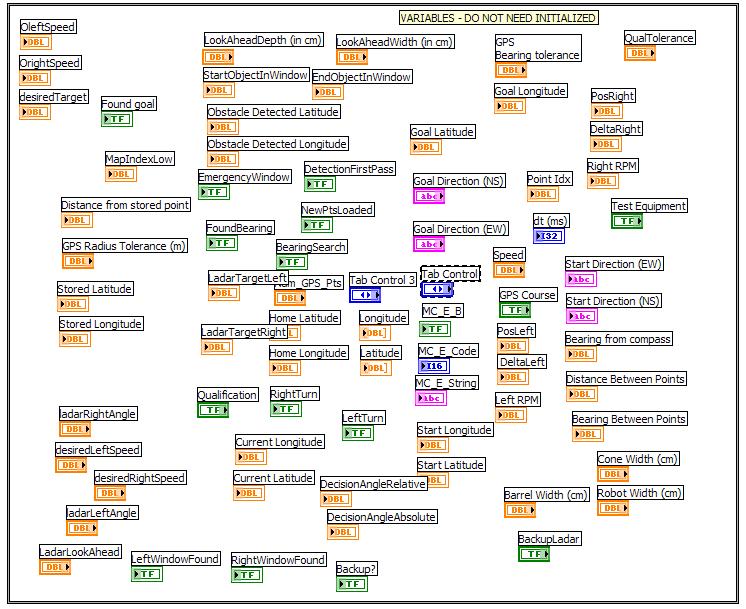
These are all the uninitilized variables used by he Wunderbot.
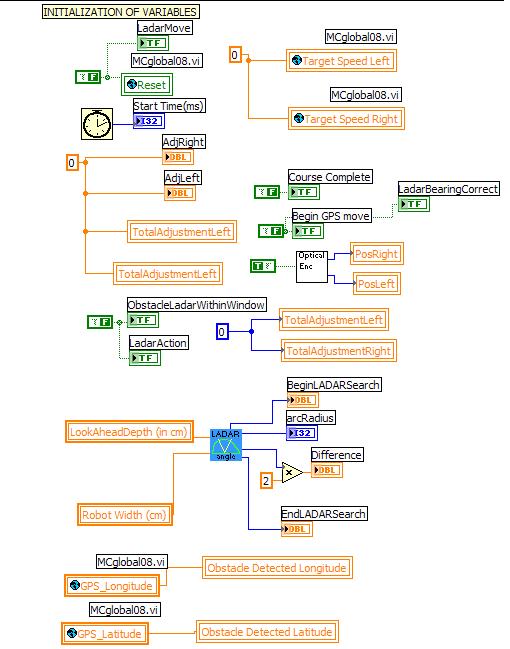
These are the initialized variables for the Wunderbot. As you can see, this initializes some boolean variables to false and "primes the pump" for some other systems to begin the control loop.